有一种新方法可以为典型的相机提供 3D 功能
![]() 4分钟读
4分钟读
![]() 发表于
发表于
分享此文章

改进本指南
斯坦福大学的一组研究人员与集成纳米量子系统实验室 (LINQS) 和 ArbabianLab 合作,设计了一种方法,使未来的相机能够以 3D 形式看到(尤其是看到光)三个维度)。 该项目始于团队指出,如今的光探测和测距(LiDAR 或激光雷达)系统由于其尺寸而变得不方便。
“现有的激光雷达系统又大又笨重,但有一天,如果你想在数百万架自主无人机或轻型机器人车辆中使用激光雷达功能,你会希望它们非常小、非常节能并提供高性能,”第一作者 Okan Atalar 说 新文 在《自然通讯》杂志上发表文章,也是斯坦福大学电气工程专业的博士生。
然后,该团队创建了一个紧凑的设备,使其更节能(因为激光雷达由于其使用的组件的尺寸和数量而可能消耗过多的功率)并且非常适合集成到 相机 日常手机和数码单反相机。 该研究主要依赖于声学共振现象。 它介绍了铌酸锂薄晶片的使用,据说由于其电学、声学和光学特性,它是一种完美的材料。
铌酸锂涂有两个透明电极作为简单的声调制器。 从技术上讲,当通过所述声调制器的电极使用电力时,振动将以非常可预测和可控的频率有效地发生。 然后铌酸锂将调制光,而添加的几个偏振器将每秒打开和关闭数百万次光。
这个过程是必不可少的,也是将 3D 成像添加到标准传感器的已知方法之一。 与激光雷达一样,该过程将有效地帮助测量光线的变化并计算距离。 如前所述,在其他系统中发现的现有调制器可能具有高能耗,这是不切实际的。 但是通过研究人员展示的方法,有可能在小型相机中引入 3D 成像,例如手机和无人机上的相机。 据研究人员称,它可以成为未来“标准CMOS激光雷达”的基础。 (CMOS 图像传感器几乎普遍用于智能手机)。
“此外,晶片和电极的几何形状定义了光调制的频率,因此我们可以微调频率,”Atalar 补充道。 “改变几何形状,你就改变了调制频率……虽然还有其他方法可以打开和关闭灯,”Atalar 说,“这种声学方法更可取,因为它非常节能。”
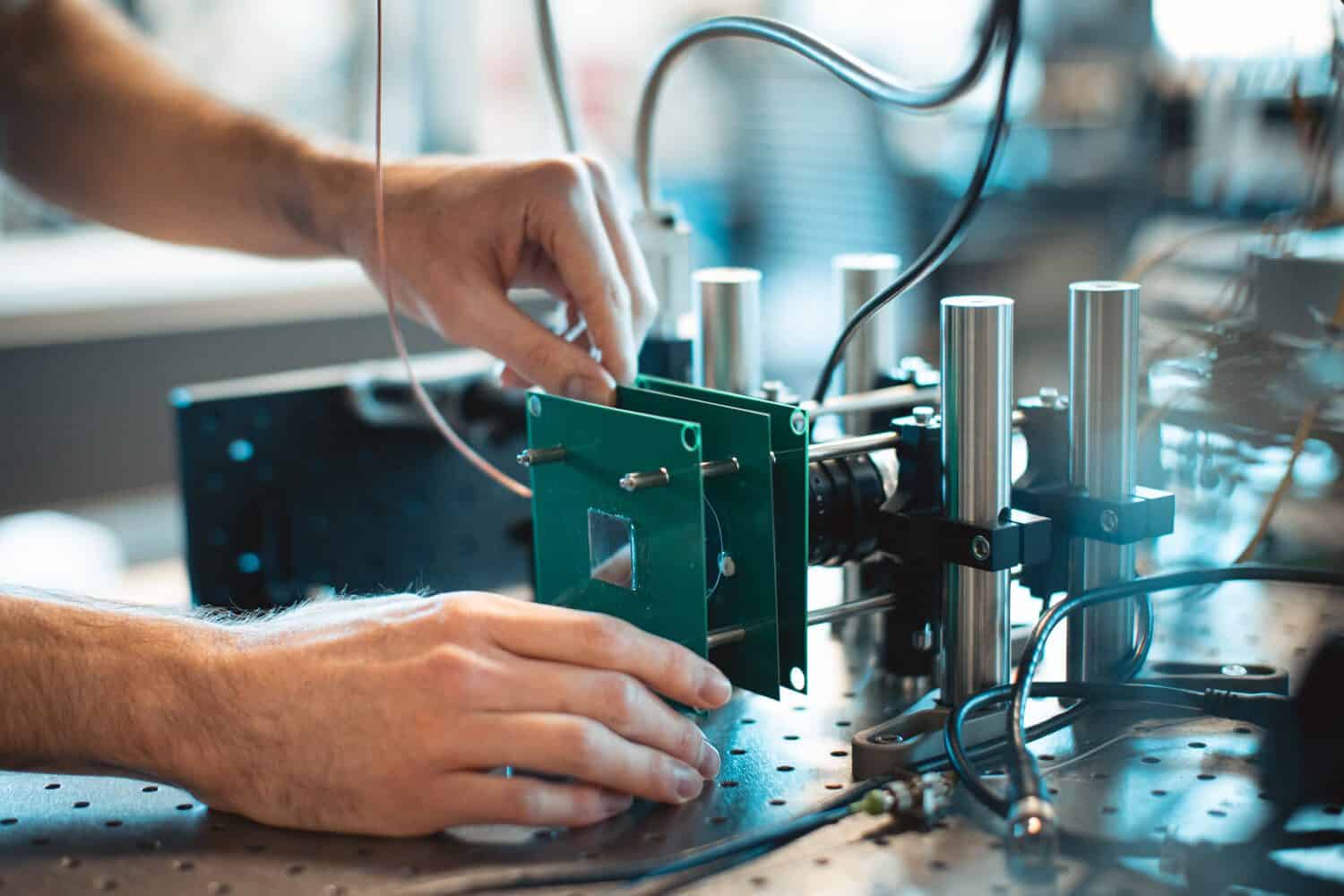
研究人员通过使用市售数码相机作为受体在实验室工作台上构建原型激光雷达系统来尝试该技术。 根据该团队的报告,新系统能够生成百万像素分辨率的深度图。 此外,他们表示,该团队创建的光学调制器仅消耗少量功率,甚至比论文中介绍的功率降低了 10 倍。
有了这个,如果技术得到它需要的支持,它可以为 智能手机 市场等等。 它还可以彻底改变我们使用所有带有相机的设备的方式,包括标准的专业相机、无人机、平板电脑、 笔记本电脑, 和更多。 这可能意味着它们的附加功能和能力可以以各种方式帮助我们,例如在捕获的图像中获取更多细节。 研究人员还表示,通过百万像素分辨率的激光雷达,系统将更容易在更出色的范围内有效地识别目标。 例如,当用于自动驾驶汽车时,改进的激光雷达系统可以在相当远的距离区分行人和骑自行车的人,从而形成更好的系统来防止事故。