マイクロソフトはロボットオペレーティングシステムをWindows10にもたらします
![]() 2分。 読んだ
2分。 読んだ
![]() 上で公開
上で公開
この記事を共有する

このガイドを改善する
MSPoweruser の編集チームの維持にどのように貢献できるかについては、開示ページをお読みください。 続きを読む
本日、スペインのマドリッドで開催されたROSCon 2018で、マイクロソフトはWindows用のロボットオペレーティングシステム[ROS1]の実験的リリースを発表しました。 ROSは、開発者が複雑なロボットを構築するのに役立つライブラリとツールのセットであり、世界中の多くの最先端のロボットプロジェクトで使用されています。 Microsoftによると、この動きにより、Windows 10 IoTEnterpriseの管理性とセキュリティが革新的なROSエコシステムにもたらされるとのことです。
マイクロソフトは、Open RoboticsおよびROSインダストリアルコンソーシアム(参加者)と協力して、RobotオペレーティングシステムをWindowsに導入しています。 ROS for Windowsを使用すると、開発者は使い慣れたVisualStudioツールセットを豊富なAIおよびクラウド機能とともに使用できるようになります。 製造業者は、ロボットに周囲の状況をより認識させ、プログラミングを容易にし、周囲に安全に配置できるようにしたいと考えています。 マイクロソフトは、ハードウェアで高速化されたWindows機械学習、コンピュータービジョン、Azure Cognitive Services、Azure IoTクラウドサービス、その他のMicrosoftテクノロジーなどの高度な機能を家庭用、教育用、商用、および産業用ロボットに導入することで、ロボット工学にインテリジェントなエッジをもたらすことを望んでいます。
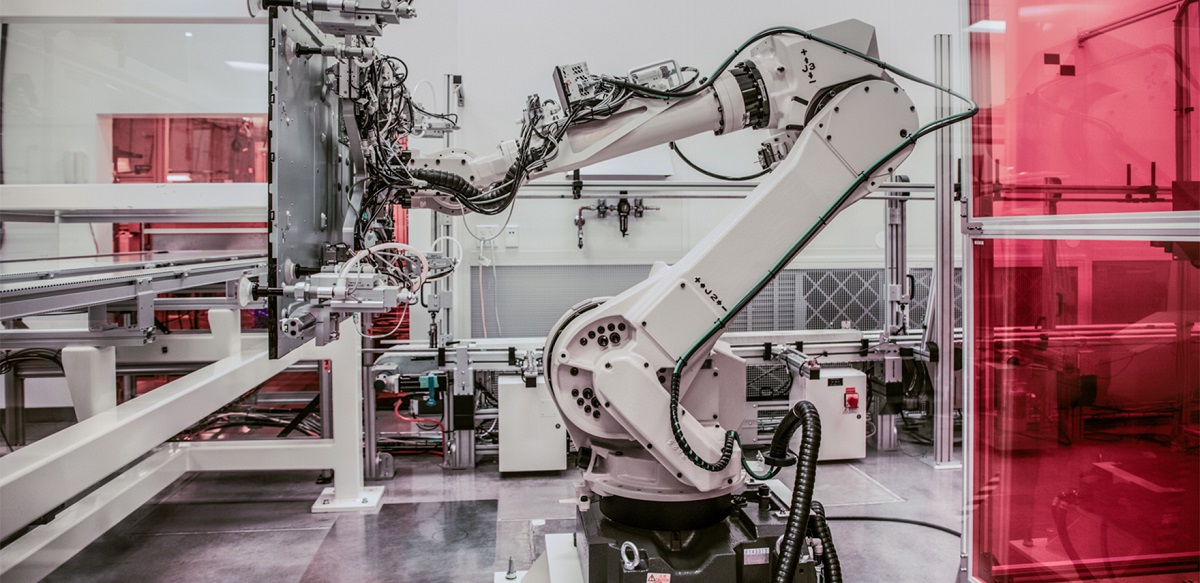
スペインのマドリッドで開催されたROSCon2018で、マイクロソフトはROBOTIS Turtlebot 3ロボットのデモを行い、Melodic Moreniaとして知られるROSリリースを実行します。このロボットは、ロボットに最も近い人物を認識して操縦します。 ロボットは、ハードウェアアクセラレーションによるWindows機械学習を活用する新しいROSノードを使用して、Intel Coffee LakeNUC上でWindows10 IoTEnterpriseを実行します。
マイクロソフトは、Azureで動作するROSシミュレーション環境も紹介しました。 オーケストレーションシステムに接続され、Azure IoT Hub経由で制御される仮想世界で動くロボットの集まりを示しています。
Microsoftは、ROS1およびまもなくROS2用のWindowsビルドをホストし、Windows用のドキュメント、開発、および展開ソリューションを提供します。 ROS forWindowsおよびROSwith Azureの使用を開始するには、次のWebサイトにアクセスしてください。 入門ガイドはこちら.