سیستم تلهکینزی رباتیک جدید، اقدامات را از طریق دوربین ترجمه میکند
![]() 3 دقیقه خواندن
3 دقیقه خواندن
![]() منتشر شده در
منتشر شده در
این مقاله را به اشتراک بگذارید

این راهنما را بهبود بخشید
صفحه افشای ما را بخوانید تا بدانید چگونه می توانید به MSPoweruser کمک کنید تا تیم تحریریه را حفظ کند ادامه مطلب
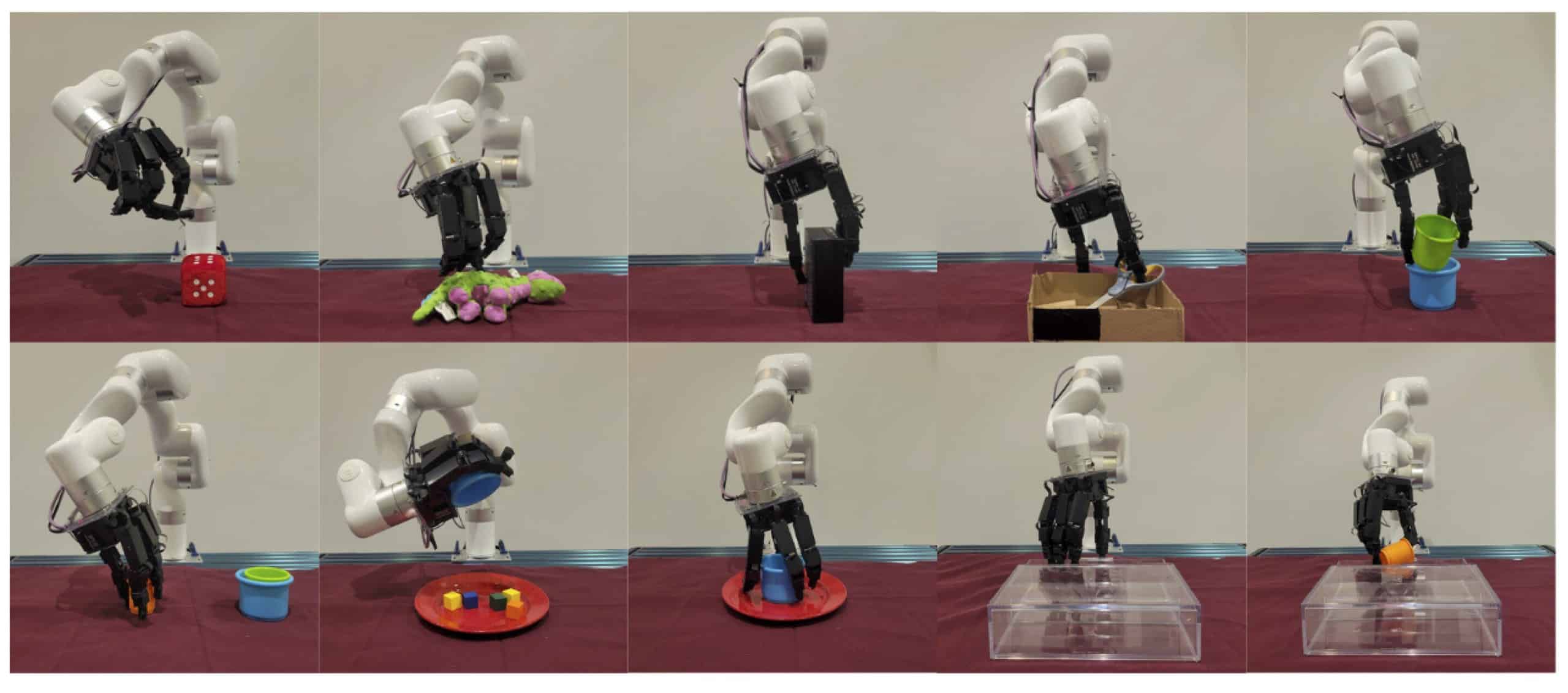

کنترل ربات ها آینده امیدوار کننده ای برای ما دارد، اما کنترل مدل های فعلی امروز برای کاربران آموزش ندیده دشوار است. آنها اغلب شامل الکترونیک پیچیده برای دستکاری می شوند، اما با سیستمی که توسط گروهی از محققان دانشگاه کارنگی ملون راه اندازی شده است، این در حال تغییر است. تله کینزی روباتیک.
علاوه بر قابلیت کنترل ربات از راه دور، خبر هیجان انگیز دیگر در مورد این سیستم تله حرکتی رباتیک، توانایی آن در ترجمه عملکرد کاربر از طریق RGB است. دوربین. دست و بازوی روباتیک با نشان دادن یک عمل خاص، عمل را تکرار می کنند. این امر آن را از اختراعات قبلی که معمولاً از سیستم های پیچیده برای کنترل ربات ها مانند کنترل از راه دور و سایر دستگاه ها استفاده می کنند، متفاوت می کند.
دیپاک پاتاک، یکی از محققان این تیم گفت: «کارهای قبلی در این زمینه یا به دستکش، نشانگرهای حرکتی یا تنظیم چند دوربین کالیبره شده متکی بودند. TechXplore. در عوض، سیستم ما با استفاده از یک دوربین بدون کالیبره کار می کند. از آنجایی که نیازی به کالیبراسیون نیست، کاربر می تواند در هر جایی بایستد و همچنان با موفقیت از راه دور ربات را اداره کند.
به گفته پاتاک، چیزی که حتی سیستم این ربات را قابل توجه می کند این واقعیت است که به طور کامل فقط با یک سری از ربات ها آموزش دیده است. یوتیوب ویدیوهایی که افراد را در حال انجام حرکات بازو نشان می دهد. Pathak گفت که میتواند تصاویر دو بعدی ساده را تجزیه و تحلیل کند و آن را به یک فناوری فوقالعاده ساده برای هر کسی – حتی برای یک فرد غیر تمرینی – تبدیل میکند. او گفت که تیم باید بر روی دید کامپیوتری و تخمین ژست سه بعدی انسان تمرکز کند.
Pathak اظهار داشت: «تنوع دادههای ویدیویی غیرفعال عظیم به آن کمک میکند تا در میان کاربران، وظایف و اشیاء آموزشدیده کار کند. «سیستم ما روشی کمهزینه و طبیعی برای آموزش روباتها از طریق نمایش ارائه میکند، برخلاف در دست گرفتن حرکتی ربات یا پوشیدن دستکش یا لباس ضبط حرکت... امیدواریم، کار اخیر ما تنها یکی از بسیاری از جهتگیریهای آینده باشد که ویدیوهای اینترنتی در آن عمل میکنند. به عنوان منبع غنی نظارت برای کنترل رباتیک، علاوه بر دید رباتیک.
با تمام این موارد، محققان معتقدند که این فناوری می تواند در موقعیت های روزمره مفید باشد، به ویژه برای کارهایی که می تواند برای حضور انسان خطرناک باشد.
تلهکینزی رباتیک و فنآوریهای مشابه، امکان آموزش رباتها را در محیطهای متنوعتر، از جمله در خانوادهها، فراهم میکند، جایی که از آنها انتظار میرود وظایف روزمره را انجام دهند.» پاتاک گفت: "با استفاده از تنها یک دوربین بدون کالیبره، سیستم ما از نظر تئوری می تواند از هر نقطه در جهان کنترل شود، بنابراین آموزش ربات را برای همه قابل دسترس تر می کند. ما اکنون در حال جمعآوری دادههای مقیاس بزرگ با استفاده از سیستم تلهکینزی روباتیک خود هستیم تا به ربات آموزش دهیم تا در دنیای واقعی بهطور مستقل عمل کند و سازگار شود.»