有一種新方法可以為典型的相機提供 3D 功能
![]() 4分鐘讀
4分鐘讀
![]() 發表於
發表於
分享此文章

改進本指南
斯坦福大學的一組研究人員與集成納米量子系統實驗室 (LINQS) 和 ArbabianLab 合作,設計了一種方法,使未來的相機能夠以 3D 形式看到(尤其是看到光)三個維度)。 該項目始於團隊指出,如今的光探測和測距(LiDAR 或激光雷達)系統由於其尺寸而變得不方便。
“現有的激光雷達系統又大又笨重,但有一天,如果你想在數百萬架自主無人機或輕型機器人車輛中使用激光雷達功能,你會希望它們非常小、非常節能並提供高性能,”第一作者 Okan Atalar 說 新文 在《自然通訊》雜誌上發表文章,也是斯坦福大學電氣工程專業的博士生。
然後,該團隊創建了一個緊湊的設備,使其更節能(因為激光雷達由於其使用的組件的尺寸和數量而可能消耗過多的功率)並且非常適合集成到 相機 日常手機和數碼單反相機。 該研究主要依賴於聲學共振現象。 它介紹了鈮酸鋰薄晶片的使用,據說由於其電學、聲學和光學特性,它是一種完美的材料。
鈮酸鋰塗有兩個透明電極作為簡單的聲調製器。 從技術上講,當通過所述聲調製器的電極使用電力時,振動將以非常可預測和可控的頻率有效地發生。 然後鈮酸鋰將調製光,而添加的幾個偏振器將每秒打開和關閉數百萬次光。
這個過程是必不可少的,也是將 3D 成像添加到標準傳感器的已知方法之一。 與激光雷達一樣,該過程將有效地幫助測量光線的變化併計算距離。 如前所述,在其他系統中發現的現有調製器可能具有高能耗,這是不切實際的。 但是通過研究人員展示的方法,有可能在小型相機中引入 3D 成像,例如手機和無人機上的相機。 據研究人員稱,它可以成為未來“標準CMOS激光雷達”的基礎。 (CMOS 圖像傳感器幾乎普遍用於智能手機)。
“此外,晶片和電極的幾何形狀定義了光調製的頻率,因此我們可以微調頻率,”Atalar 補充道。 “改變幾何形狀,你就改變了調製頻率……雖然還有其他方法可以打開和關閉燈,”Atalar 說,“這種聲學方法更可取,因為它非常節能。”
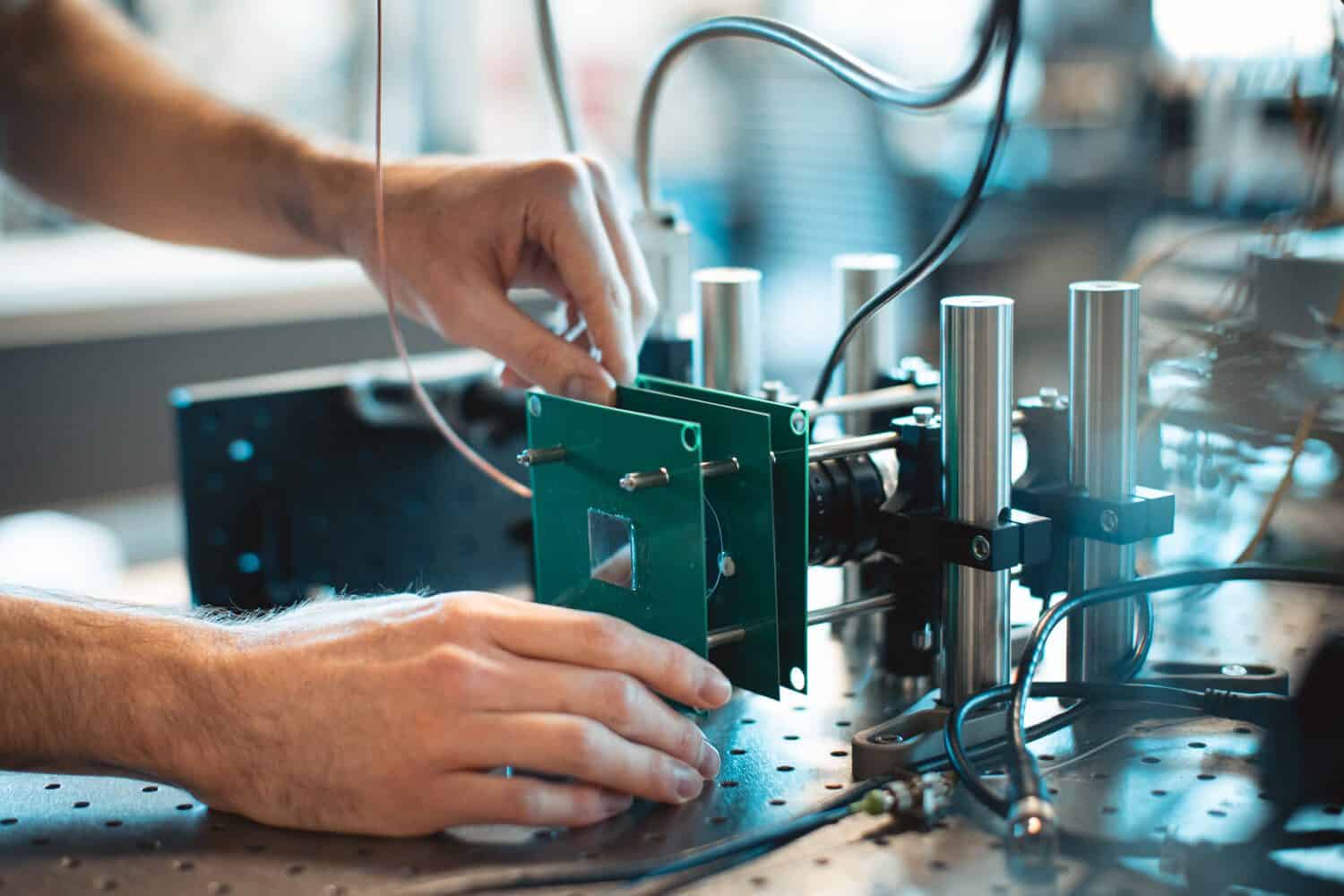
研究人員通過使用市售數碼相機作為受體在實驗室工作台上構建原型激光雷達系統來嘗試該技術。 根據該團隊的報告,新系統能夠生成百萬像素分辨率的深度圖。 此外,他們表示,該團隊創建的光學調製器僅消耗少量功率,甚至比論文中介紹的功率降低了 10 倍。
有了這個,如果技術得到它需要的支持,它可以為 智能手機 市場等等。 它還可以徹底改變我們使用所有帶有相機的設備的方式,包括標準的專業相機、無人機、平板電腦、 筆記本電腦, 和更多。 這可能意味著它們的附加功能和能力可以以各種方式幫助我們,例如在捕獲的圖像中獲取更多細節。 研究人員還表示,通過百萬像素分辨率的激光雷達,系統將更容易在更出色的範圍內有效地識別目標。 例如,當用於自動駕駛汽車時,改進的激光雷達系統可以在相當遠的距離區分行人和騎自行車的人,從而形成更好的系統來防止事故。