微軟研究院找到了一種實現人機自然交互的方法
![]() 1分鐘讀
1分鐘讀
![]() 發表於
發表於
分享此文章

改進本指南
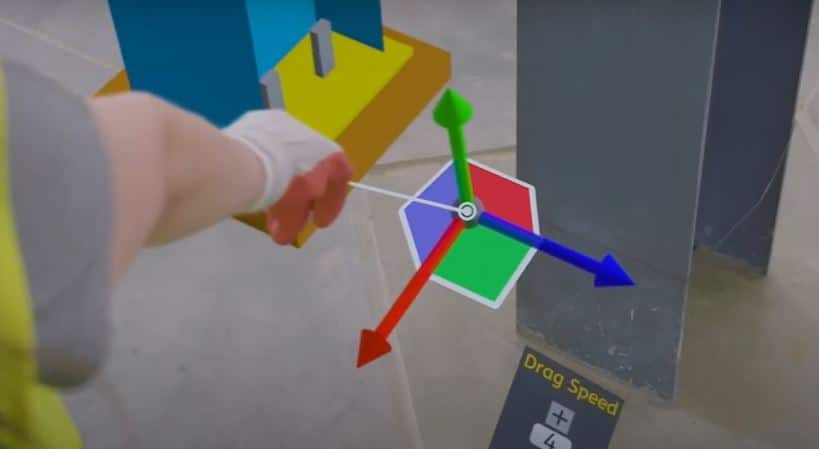
微軟研究院今天公佈了一個新項目,該項目將通過混合現實實現人與機器人之間更自然的交互。 Azure空間錨 已經支持使用共享坐標系在同一空間中對多個 HoloLens 和智能手機設備進行共定位。 通過這個項目,微軟研究院擴展了 Azure Spatial Anchors 以支持配備攝像頭的機器人。
這使得人類和機器人共享同一個空間可以自然地交互:人類可以看到機器人的計劃和意圖,而機器人可以解釋從人的角度發出的命令。
微軟為 Azure Spatial Anchors Linux SDK 創建了一個 ROS 包裝器,允許機器人(以及配備基於視覺的傳感器和姿勢估計系統的其他設備)創建和查詢 Azure Spatial Anchors,從而允許機器人與 AR 共同定位- 啟用電話和 Hololens 設備。 您可以查看項目 在 GitHub 上。
資源: Microsoft微軟