微软研究院找到了一种实现人机自然交互的方法
![]() 1分钟读
1分钟读
![]() 发表于
发表于
分享此文章

改进本指南
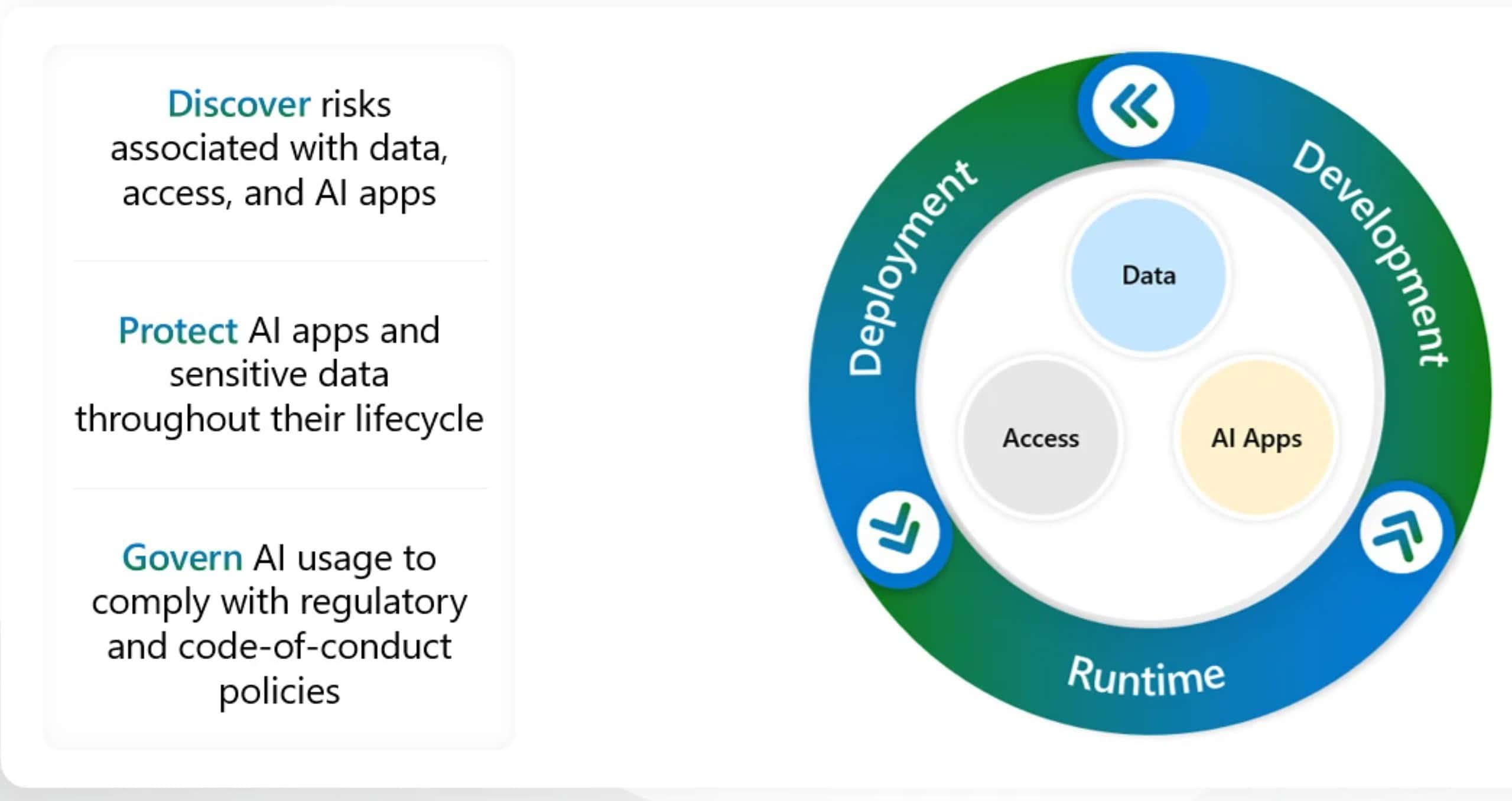
微软研究院今天公布了一个新项目,该项目将通过混合现实实现人与机器人之间更自然的交互。 Azure空间锚 已经支持使用共享坐标系在同一空间中对多个 HoloLens 和智能手机设备进行共定位。 通过这个项目,微软研究院扩展了 Azure Spatial Anchors 以支持配备摄像头的机器人。
这使得共享同一空间的人和机器人可以自然地交互:人类可以看到机器人的计划和意图,而机器人可以解释从人的角度发出的命令。
微软为 Azure Spatial Anchors Linux SDK 创建了一个 ROS 包装器,允许机器人(以及配备基于视觉的传感器和姿势估计系统的其他设备)创建和查询 Azure Spatial Anchors,从而允许机器人与 AR 共同定位- 启用电话和 Hololens 设备。 您可以查看项目 在 GitHub 上。
Sumber: 微软