การกำหนดเป้าหมายใหม่แบบสัมผัสของ Microsoft Research พยายามปรับปรุงประสบการณ์ความเป็นจริงเสมือน (วิดีโอ)
![]() 1 นาที. อ่าน
1 นาที. อ่าน
![]() เผยแพร่เมื่อ
เผยแพร่เมื่อ
แชร์บทความนี้

ปรับปรุงคู่มือนี้
อ่านหน้าการเปิดเผยข้อมูลของเราเพื่อดูว่าคุณจะช่วย MSPoweruser รักษาทีมบรรณาธิการได้อย่างไร อ่านเพิ่มเติม
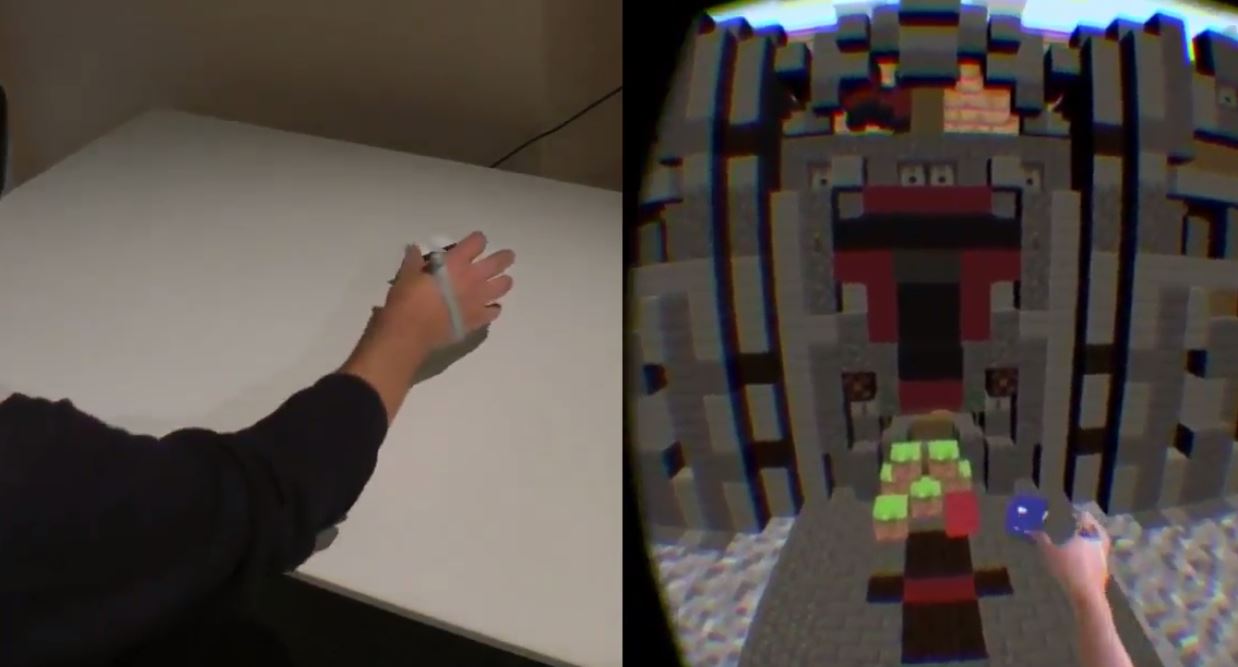
ที่ ACM CHI 2016 ซึ่งเป็นงานประชุมชั้นนำสำหรับการโต้ตอบระหว่างมนุษย์กับคอมพิวเตอร์ Microsoft Research กำลังนำเสนอบทความใหม่เกี่ยวกับเทคนิคที่เรียกว่าการกำหนดเป้าหมายใหม่แบบสัมผัส โดยทั่วไป การจัดการวัตถุเสมือนด้วยสัญญาณแฮบติคแบบพาสซีฟที่เหมาะสมจะให้ความรู้สึกที่น่าพอใจในการมีอยู่ในโลกเสมือนจริง อย่างไรก็ตาม การสนับสนุนวัตถุเสมือนหลายรายการเป็นสิ่งที่ท้าทาย เนื่องจากแต่ละรายการต้องมาพร้อมกับวัตถุพร็อกซีแบบสัมผัสที่อยู่ตำแหน่งที่แม่นยำ Microsoft Research กำลังเสนอการกำหนดเป้าหมายใหม่แบบสัมผัสที่เอาชนะข้อ จำกัด นี้โดยใช้ประโยชน์จากการครอบงำของการมองเห็นเมื่อความรู้สึกของเราขัดแย้งกัน
ด้วยการกำหนดเป้าหมายใหม่แบบแฮบติก พร็อพทางกายภาพเพียงชิ้นเดียวสามารถจัดเตรียมแฮบติคแบบพาสซีฟสำหรับออบเจ็กต์เสมือนหลายรายการได้ เราแนะนำสามวิธีในการจัดตำแหน่งวัตถุจริงและเสมือนแบบไดนามิก: การจัดการโลก การจัดการร่างกาย และเทคนิคไฮบริดที่ผสมผสานทั้งโลกและการจัดการร่างกาย ผลการศึกษาของเราระบุว่าเทคนิคการกำหนดเป้าหมายซ้ำแบบสัมผัสทั้งหมดของเราปรับปรุงความรู้สึกของการมีอยู่ เมื่อเทียบกับการควบคุมวัตถุเสมือนแบบ 3 มิติแบบใช้ไม้กายสิทธิ์ทั่วไป นอกจากนี้ การกำหนดเป้าหมายซ้ำแบบแฮบติคแบบไฮบริดของเรายังได้รับคะแนนความพึงพอใจและการมีอยู่สูงสุด ในขณะที่จำกัดผลข้างเคียงที่มองเห็นได้ในระหว่างการโต้ตอบ
ดูวิดีโอสาธิตด้านบนและเยี่ยมชม พลอากาศเอก สำหรับรายละเอียดเพิ่มเติมเกี่ยวกับบทความนี้






