Postoji novi pristup koji tipičnim kamerama daje 3D mogućnosti
![]() 4 min. čitati
4 min. čitati
![]() Objavljeno na
Objavljeno na
Podijelite ovaj članak

Poboljšajte ovaj vodič
Pročitajte našu stranicu za otkrivanje kako biste saznali kako možete pomoći MSPoweruseru da održi urednički tim Čitaj više
Tim istraživača sa Sveučilišta Stanford, u suradnji između Laboratorija za integrirane nano-kvantne sustave (LINQS) i ArbabianLaba, osmislio je način da omogući kamerama u budućnosti da vide u 3D (posebno da vide svjetlost u tri dimenzije). Projekt je započeo s tim da je tim istaknuo da su sustavi za detekciju svjetla i dometa (LiDAR ili lidar) ovih dana nezgodni zbog svoje veličine.
"Postojeći lidarski sustavi su veliki i glomazni, ali jednog dana, ako želite lidarske sposobnosti u milijunima autonomnih dronova ili u laganim robotskim vozilima, htjet ćete da budu vrlo mali, vrlo energetski učinkoviti i da nude visoke performanse", rekao je Okan Atalar, prvi autor na novom papiru u časopisu Nature Communications i doktorski kandidat iz elektrotehnike na Stanfordu.
Tim je potom stvorio kompaktan uređaj, koji mu je omogućio da bude energetski učinkovitiji (budući da lidar može potrošiti previše energije zbog veličine i broja komponenti koje koristi) i da je dobro prikladan za integraciju u Kamere svakodnevnih mobitela i digitalnih SLR-a. Studija se u osnovi oslanja na fenomen akustične rezonancije. Uvodi upotrebu tanke pločice litijevog niobata, za koju se kaže da je savršen materijal zbog svojih električnih, akustičkih i optičkih svojstava.
Litijev niobat je obložen s dvije prozirne elektrode kao jednostavni akustični modulator. Tehnički, kada se električna energija koristi kroz elektrode navedenog akustičkog modulatora, vibracije će se učinkovito pojaviti na vrlo predvidljivim i kontroliranim frekvencijama. Litijev niobat će tada modulirati svjetlost dok će nekoliko dodatih polarizatora uključiti i isključiti svjetlo nekoliko milijuna puta u sekundi.
Ovaj je proces bitan i jedan od poznatih pristupa dodavanju 3D slike standardnim senzorima. Kao u lidaru, proces će učinkovito pomoći u mjerenju varijacija u svjetlu i izračunavanju udaljenosti. I kao što je rečeno, postojeći modulatori koji se nalaze u drugim sustavima mogu imati veliku potrošnju energije, što je nepraktično. Ali s pristupom koji su pokazali istraživači, postoji mogućnost uvođenja 3D slika u male kamere poput onih koje se nalaze na telefonima i dronovima. Prema istraživačima, to može biti temelj "standardnog CMOS lidara" u budućnosti. (CMOS senzori slike gotovo se univerzalno koriste u pametnim telefonima).
“Štoviše, geometrija pločica i elektroda definira frekvenciju svjetlosne modulacije, tako da možemo fino podesiti frekvenciju”, dodao je Atalar. “Promijenite geometriju i promijenit ćete frekvenciju modulacije… Iako postoje drugi načini za uključivanje i isključivanje svjetla,” kaže Atalar, “ovaj je akustični pristup poželjniji jer je izuzetno energetski učinkovit.”
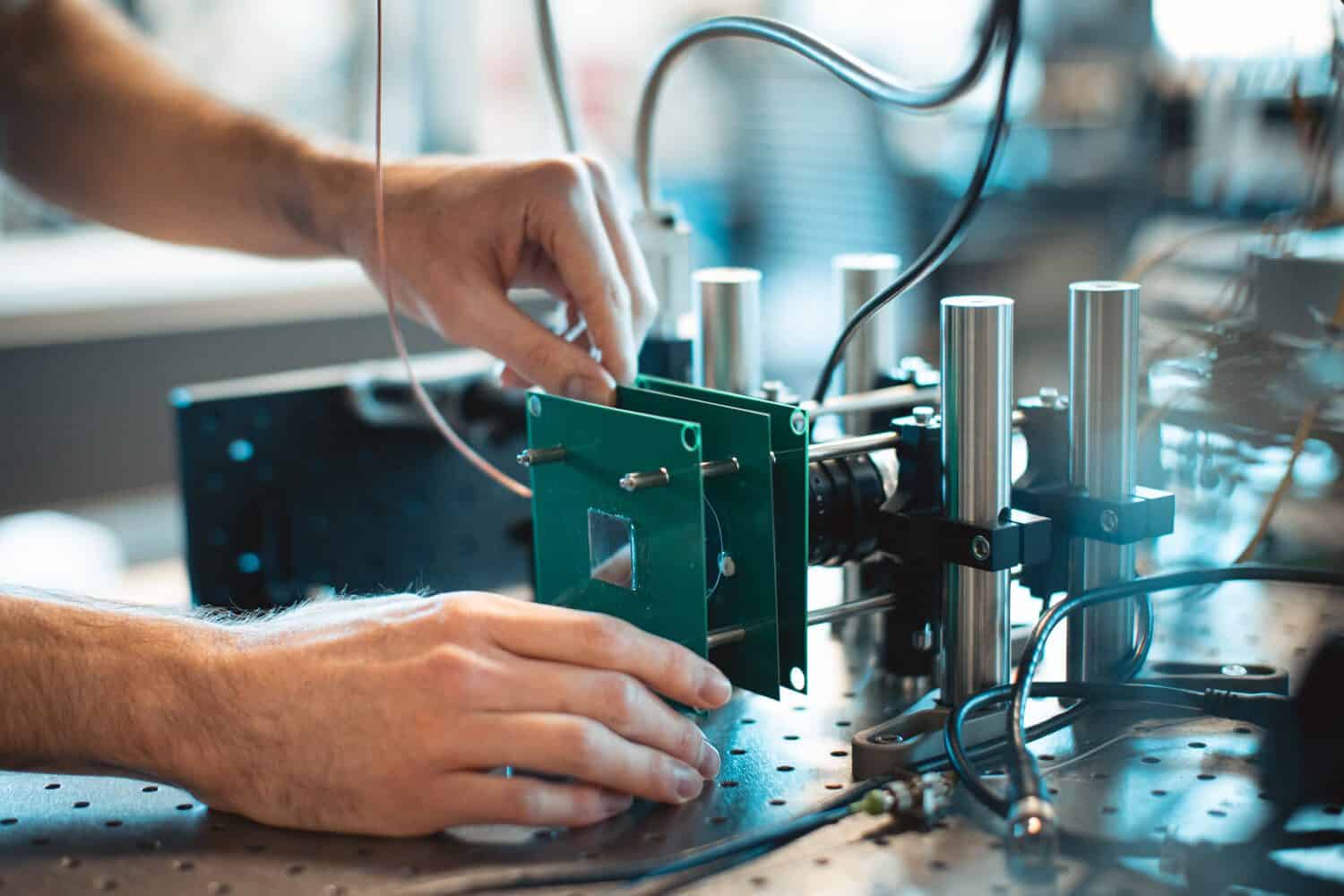
Istraživači su isprobali tehnologiju izgradnjom prototipa lidarskog sustava na laboratorijskoj klupi koristeći komercijalno dostupnu digitalnu kameru kao prijemnik. Prema izvješćima tima, novi je sustav mogao proizvesti mape dubine s razlučivosti megapiksela. Osim toga, rekli su da je optički modulator koji je stvorio tim nevjerojatno trošio samo malu količinu energije i da je čak 10 puta niže od onoga što je predstavljeno u radu.
Uz to, ako tehnologija dobije potrebnu podršku, to bi moglo otvoriti nove mogućnosti za smartphone tržište i još mnogo toga. Također može revolucionarizirati način na koji koristimo sve uređaje s kamerama, uključujući standardne profesionalne kamere, dronove, tablete, prijenosna računala, i više. To im može značiti dodatne funkcije i mogućnosti koje nam mogu pomoći na različite načine, poput dobivanja više detalja u snimljenim slikama. Putem lidara razlučivosti megapiksela, istraživači također kažu da će sustavu biti lakše učinkovito identificirati mete na izvrsnijem dometu. Na primjer, kada se koristi za autonomne automobile, poboljšani lidarski sustav može razlikovati pješake od biciklista na značajnim udaljenostima, što rezultira boljim sustavom za sprječavanje nesreća.