تحقیقات مایکروسافت راهی برای فعال کردن تعامل طبیعی بین انسان و روباتها پیدا میکند
![]() 1 دقیقه خواندن
1 دقیقه خواندن
![]() منتشر شده در
منتشر شده در
این مقاله را به اشتراک بگذارید

این راهنما را بهبود بخشید
صفحه افشای ما را بخوانید تا بدانید چگونه می توانید به MSPoweruser کمک کنید تا تیم تحریریه را حفظ کند ادامه مطلب
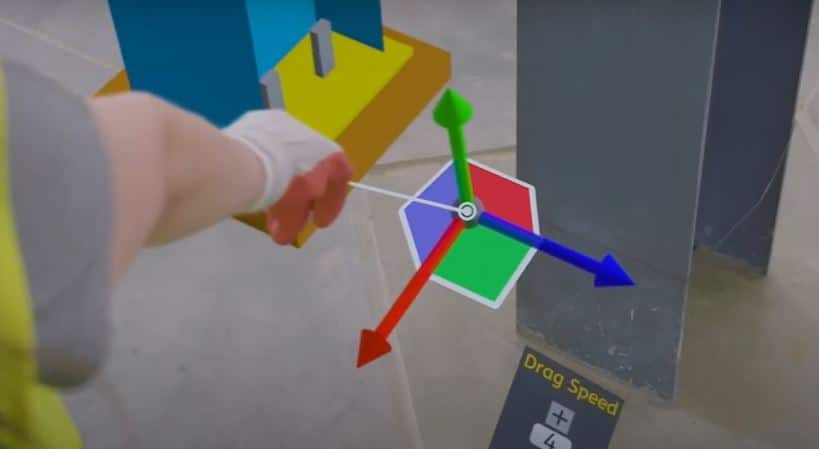
تحقیقات مایکروسافت امروز پروژه جدیدی را فاش کرد که تعامل طبیعی بیشتری را بین انسان و روباتها از طریق واقعیت ترکیبی ممکن میسازد. لنگرهای فضایی لاجوردی در حال حاضر از هولولنز و دستگاه های تلفن هوشمند متعدد در یک فضا با استفاده از یک سیستم مختصات مشترک پشتیبانی می کند. با این پروژه، Microsoft Research لنگرهای فضایی Azure را برای پشتیبانی از رباتهای مجهز به دوربین توسعه داده است.
این به انسانها و روباتهایی که فضای یکسانی دارند اجازه میدهد تا به طور طبیعی با هم تعامل داشته باشند: انسانها میتوانند نقشه و قصد ربات را ببینند، در حالی که ربات میتواند دستورات داده شده را از دیدگاه شخص تفسیر کند.
مایکروسافت یک پوشش ROS برای Azure Spatial Anchors Linux SDK ایجاد کرده است که به روباتها (و سایر دستگاههای مجهز به حسگرهای مبتنی بر بینایی و یک سیستم تخمین پوس) اجازه میدهد تا Azure Spatial Anchors را ایجاد کرده و پرس و جو کنند و به ربات اجازه میدهد تا با AR محلیسازی شود. تلفن های فعال و دستگاه های هولولنز. می توانید پروژه را بررسی کنید اینجا در GitHub.
منبع: مایکروسافت