Novo sistema de telecinesia robótica traduz ações via câmera
![]() 3 minutos. ler
3 minutos. ler
![]() Publicado em
Publicado em
Compartilhe este artigo

Melhore este guia
Leia nossa página de divulgação para descobrir como você pode ajudar o MSPoweruser a sustentar a equipe editorial Saiba mais
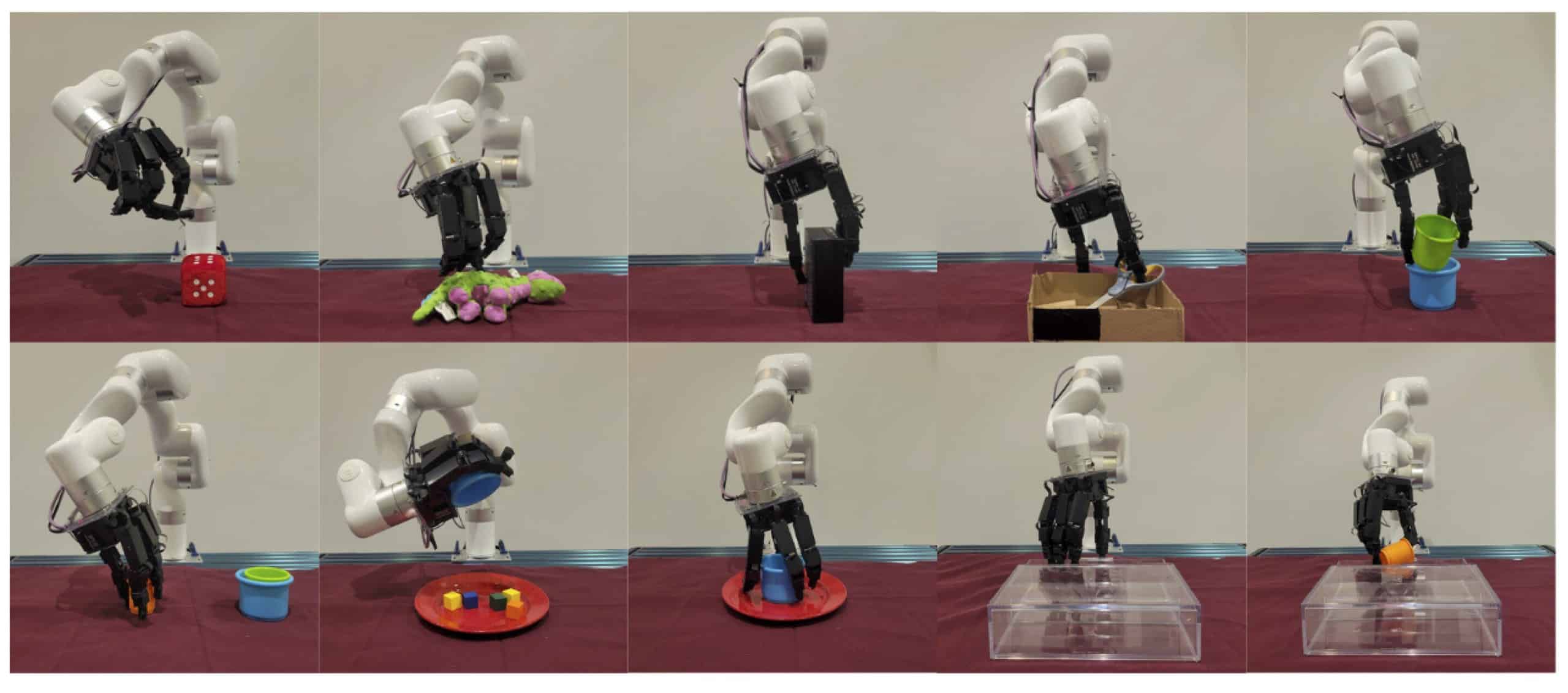

Controlável robôs têm um futuro promissor para nós, mas os modelos atuais de hoje podem ser difíceis de controlar para usuários não treinados. Eles geralmente envolvem eletrônica complexa para manipular, mas isso está prestes a mudar com o sistema iniciado por um grupo de pesquisadores da Carnegie Mellon University – telecinese robótica.
Além da capacidade de controlar o robô remotamente, outra novidade interessante sobre este sistema de telecinesia robótica é sua capacidade de traduzir a ação do usuário por meio de um RGB Câmera. A mão e o braço robóticos replicarão a ação simplesmente demonstrando uma ação específica. Isso o torna diferente das invenções anteriores que geralmente utilizam sistemas complicados para controlar robôs, como controladores remotos e outros dispositivos.
“Trabalhos anteriores nesta área dependem de luvas, marcadores de movimento ou uma configuração multicâmera calibrada”, disse Deepak Pathak, um dos pesquisadores da equipe. TechXplore. “Em vez disso, nosso sistema funciona usando uma única câmera não calibrada. Como nenhuma calibração é necessária, o usuário pode estar em qualquer lugar e ainda teleoperar com sucesso o robô.”
Segundo Pathak, o que ainda torna o sistema do robô notável é o fato de ele ter sido inteiramente treinado com apenas uma série de YouTube vídeos mostrando indivíduos realizando ações com os braços. Pathak disse que pode analisar imagens bidimensionais simples, tornando-se uma tecnologia incrivelmente direta para qualquer pessoa – mesmo uma pessoa sem prática. Ele disse que a equipe teve que se concentrar em visão computacional e estimativa de pose humana 3D.
“A diversidade de enormes dados de vídeo passivos ajuda a trabalhar com usuários, tarefas e objetos não treinados”, afirmou Pathak. “Nosso sistema oferece uma maneira natural e de baixo custo de ensinar robôs por meio de demonstrações, em vez de segurar o robô cinestesicamente ou usar uma luva ou traje de captura de movimento… como uma rica fonte de supervisão para controle robótico, além de visão robótica.”
Com todas essas coisas, os pesquisadores acreditam que a tecnologia pode ser útil em situações cotidianas, especialmente em tarefas que podem ser perigosas para a presença de um humano.
“A telecinese robótica e tecnologias semelhantes permitirão o ensino de robôs em uma variedade maior de ambientes, inclusive em residências, onde se espera que eles realizem tarefas cotidianas”. Pathak disse: “Usando apenas uma única câmera não calibrada, nosso sistema pode, em teoria, ser controlado de qualquer lugar do mundo, tornando o ensino de robôs mais acessível a qualquer pessoa. Agora estamos coletando dados em grande escala usando nosso sistema de telecinesia robótica para ensinar o robô a agir e se adaptar de forma autônoma no mundo real”.