Microsoft znajduje sposób na zmniejszenie liczby części i kosztów HoloLens
![]() 4 minuta. czytać
4 minuta. czytać
![]() Zaktualizowano na
Zaktualizowano na
Udostępnij ten artykuł

Ulepsz ten przewodnik
Przeczytaj naszą stronę z informacjami, aby dowiedzieć się, jak możesz pomóc MSPoweruser w utrzymaniu zespołu redakcyjnego Czytaj więcej

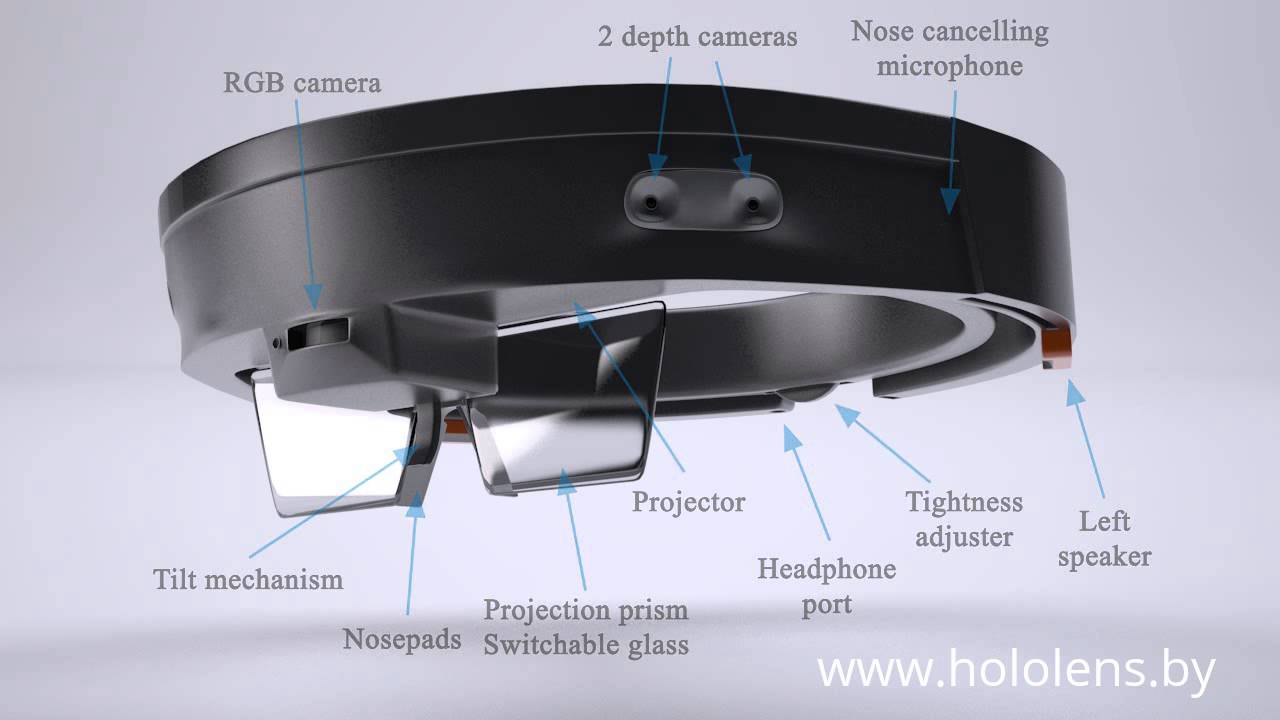
Jednym z największych wyzwań związanych z drugą generacją Microsoft HoloLens, poza polem widzenia, jest zmniejszenie rozmiarów i kosztów urządzenia.
Nowy patent Microsoftu umożliwiłby Microsoftowi jedno i drugie, pozwalając im używać jednego komponentu do dwóch celów.
Pod tytulem "KOMPAKTOWY SYSTEM OPTYCZNY ZE SKANERAMI MEMS DO GENEROWANIA OBRAZU I ŚLEDZENIA OBIEKTÓW„Patent umożliwiłby Microsoftowi umożliwienie jednego systemu generowania światła zarówno do tworzenia hologramów, jak i wykrywania głębi i rozpoznawania gestów.
Microsoft pisze:
Technologie opisane w niniejszym dokumencie zapewniają system optyczny, który wykorzystuje skaner(y) systemu mikroelektromechanicznego (MEMS) zarówno do generowania obrazów CG z perspektywy użytkownika w środowisku świata rzeczywistego, jak i do mapowania terenu w środowisku świata rzeczywistego i/lub śledzenie jednego lub więcej obiektów w środowisku rzeczywistym. W niektórych konfiguracjach silnik oświetlenia emituje promieniowanie elektromagnetyczne (EM) do zespołu optycznego, przy czym promieniowanie EM obejmuje zarówno pierwsze pasmo widmowe do generowania obrazów CG, jak i drugie pasmo widmowe do skanowania pola widzenia z wykorzystaniem protokołu mapowania terenu. Zespół optyczny może powodować propagację pierwszej szerokości pasma widmowego i drugiej szerokości pasma widmowego wzdłuż wspólnej ścieżki optycznej, a następnie oddzielanie pierwszej szerokości pasma widma od drugiej szerokości pasma widma.
W szczególności zespół optyczny kieruje pierwsze pasmo widmowe ze wspólnej ścieżki optycznej na ścieżkę optyczną generowania obrazu w celu wygenerowania obrazów CG za pośrednictwem wyświetlacza, jednocześnie kierując drugie pasmo widmowe ze wspólnej ścieżki optycznej na ścieżkę optyczną mapowania terenu do skanować teren rzeczywistego środowiska, napromieniowując w ten sposób jeden lub więcej obiektów w rzeczywistym środowisku. Stosowany tu termin „mapowanie terenu” odnosi się ogólnie do procesu skanowania światła w polu widzenia i odbierania światła odbitego od cech terenu, określając cechy terenu rzeczywistego środowiska wokół systemu optycznego. Cechy, cechy i/lub rozkłady przestrzenne powierzchni terenu w środowisku świata rzeczywistego mogą być skanowane, a dane definiujące takie cechy mogą być generowane przez system optyczny. Na przykład protokół mapowania terenu może być zastosowany do mapowania cech powierzchni w pomieszczeniu, takich jak mebel, stół lub kanapa, cech konstrukcyjnych budynku, takich jak ściana lub krawędź ściany, a nawet puste przestrzenie, takie jak korytarz lub otwarte drzwi. W niektórych implementacjach, mapowanie terenu może obejmować mapowanie cech terenu w trzech wymiarach, a wygenerowane dane definiujące cechy mogą mieć dowolny odpowiedni format, np. dane chmury punktów lub dowolny inny odpowiedni trójwymiarowy obraz danych rzeczywistych światowe środowisko. W niektórych implementacjach mapowanie terenu może obejmować śledzenie jednego lub większej liczby obiektów w terenie, np. śledzenie piłki poruszającej się po polu widzenia mapowania terenu, śledzenie gestów rąk, które mogą być interpretowane jako polecenia użytkownika itp. system optyczny może rozmieścić skaner(y) MEMS w celu generowania obrazów CG poprzez skierowanie pierwszej szerokości pasma widmowego na ścieżkę optyczną generowania obrazu, a także napromieniowanie obiektu przez skanowanie drugiej szerokości pasma widmowego w polu widzenia.
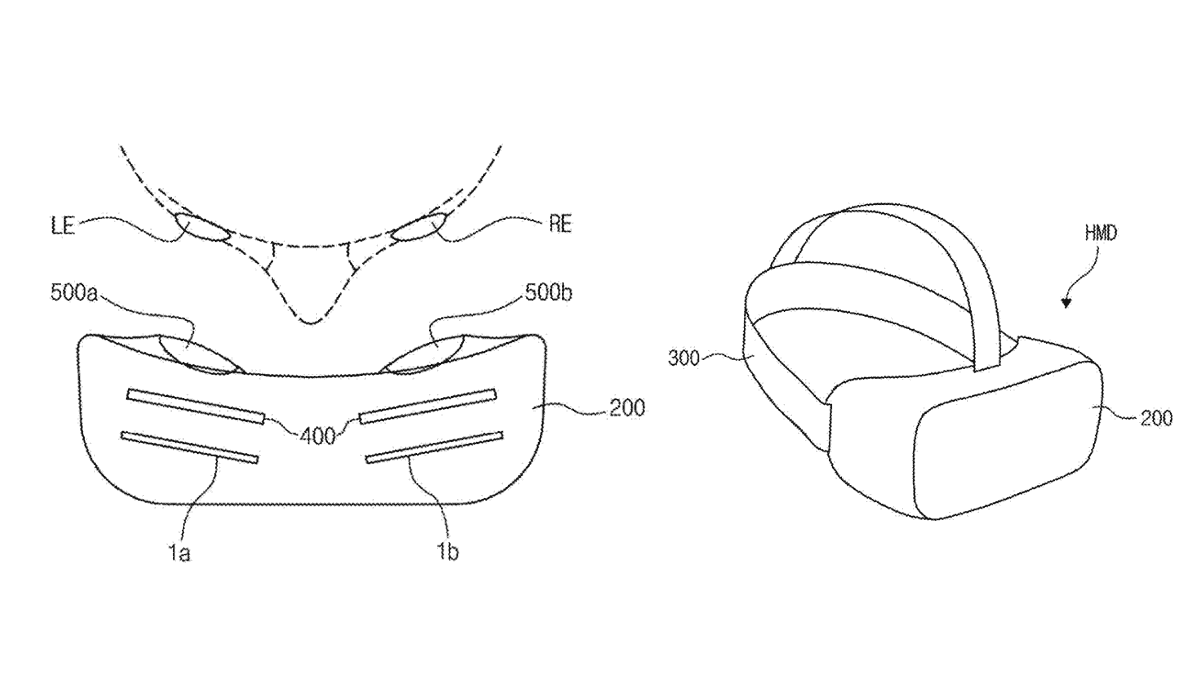
Ujawniony system optyczny eliminuje zatem potrzebę zarówno dedykowanego systemu optycznego do generowania obrazu, jak i dedykowanego systemu optycznego mapowania terenu w urządzeniu, które wymaga tych podwójnych funkcji, jak na przykład urządzenie NED. W związku z tym ujawniony układ optyczny stanowi znaczny postęp w kierunku wytwarzania kompaktowych i lekkich urządzeń NED.
Wiemy już, że następny HoloLens będzie miał ulepszona jednostka przetwarzania holograficznego z większymi możliwościami sztucznej inteligencji, ulepszony aparat głębi podobny do Kinecti będzie działać na procesorze Intel lub prawdopodobnie ARM, zgodnie z ostatnimi zmianami. Głównym wyzwaniem Microsoftu przy nowych Hololensach jest poprawa pola widzenia, które przy 35 stopniach zostało opisane jako patrzenie na świat przez szczelinę pocztową. Microsoft podobno przynosi rozwój soczewek wewnętrznie osiągnąć to przy rozsądnych kosztach.
Oczekuje się, że Microsoft ogłosi w tym kwartale swojego następcę HoloLens, ale podobnie jak w przypadku wszystkich innych produktów Microsoft, w tym roku może to nastąpić nieco później.




Forum użytkowników
Wiadomości 0