UOB 과학자들은 미래에 로봇을 더 유연하게 만드는 방법을 제시합니다
![]() 3 분. 읽다
3 분. 읽다
![]() 에 게시됨
에 게시됨
이 기사 공유

이 가이드를 개선하세요
공개 페이지를 읽고 MSPoweruser가 편집팀을 유지하는 데 어떻게 도움을 줄 수 있는지 알아보세요. 자세히 보기

로봇 분야의 새로운 가능성을 소개합니다. 연구 물리학자들이 이끄는 바스 대학 (UOB). 과학자들에 따르면 소프트 로봇을 재료로 코팅하는 방법이 있습니다. UOB는 표면에 내장된 로봇으로 구동되는 유연한 재료로 만든 로봇 팔을 만들 수 있다고 자세히 설명했습니다.
연구는 과학의 발전, 그리고 과학자들은 활성 물질의 새로운 모델링을 통해 표면에서 인간이 제어하는 활동을 통해 부드러운 고체의 움직임과 모양을 제어할 수 있다고 말했습니다. 이 연구는 추가 개발이 필요하지만 일단 준비되면 오늘날 로봇이 모델링되는 방식에 중요한 변화를 시작할 수 있다고 믿어집니다.
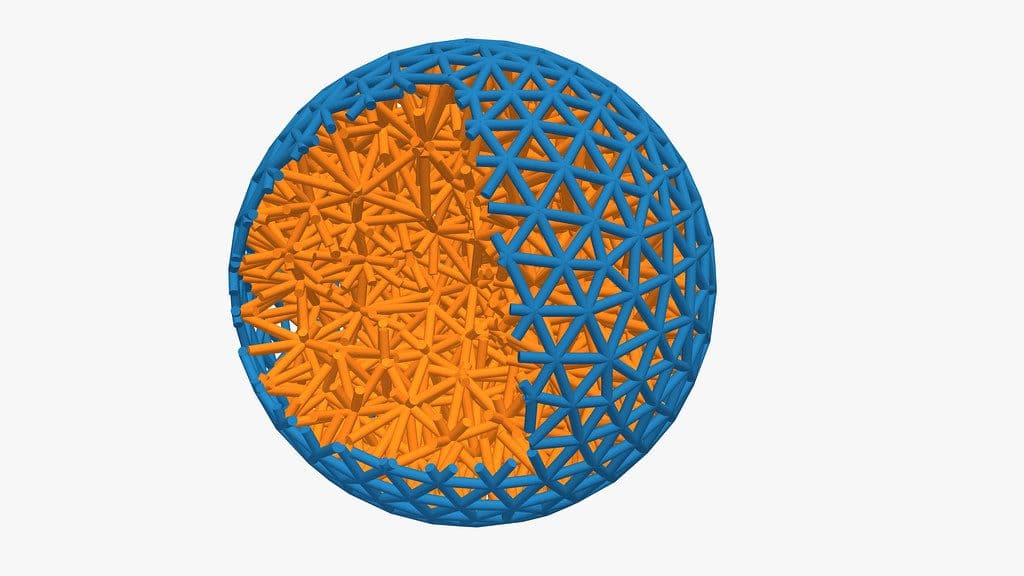
UOB는 게시물에 "일반적인 부드러운 소재의 표면은 항상 구형으로 축소됩니다."라고 적습니다. "물이 방울로 떨어지는 방식을 생각해 보십시오. 액체 및 기타 부드러운 물질의 표면이 자연적으로 가능한 가장 작은 표면적, 즉 구형으로 수축하기 때문에 구슬 모양이 발생합니다. 그러나 활성 물질은 이러한 경향에 반대하도록 설계될 수 있습니다. 이에 대한 실제 예는 나노 로봇 층으로 싸인 고무 공일 것입니다. 여기서 로봇은 공을 새로운 미리 결정된 모양(예: 별)으로 왜곡하기 위해 조화롭게 작동하도록 프로그래밍됩니다.”
이 발견은 조화롭게 작동하는 개별 능동 장치를 통해 새로운 기계의 움직임을 제어하는 데 도움이 될 것으로 기대됩니다. 이것은 중앙 컨트롤러에 의해 움직임이 결정되는 오늘날의 기계와는 거리가 멉니다. UOB는 이것을 심장 근육 섬유와 같은 인간의 생물학적 조직과 비교했습니다.
교신저자 “이 연구는 중요한 개념 증명이며 많은 유용한 함의를 가지고 있습니다.” 안톤 수슬로프 박사 말했다. "예를 들어, 미래 기술은 훨씬 더 부드럽고 섬세한 재료를 집고 다루는 데 더 나은 소프트 로봇을 생산할 수 있습니다."
UOB는 이 연구가 표면을 만드는 데 항상 일정량의 에너지가 필요하기 때문에 액체 또는 부드러운 고체 표면 에너지 비용이 항상 양수라는 아이디어를 테스트한다고 말했습니다.
"활성 물질은 표면 장력이 양수여야 한다는 사실과 같은 자연의 친숙한 규칙을 새로운 관점에서 보게 합니다." 잭 비니시 박사, 연구 제XNUMX저자가 말했다. "이 규칙을 어기면 어떻게 되는지, 그리고 그 결과를 어떻게 활용할 수 있는지 보는 것은 연구를 하기에 흥미로운 곳입니다."