Microsoft Research는 인간과 로봇 간의 자연스러운 상호 작용을 가능하게 하는 방법을 찾습니다.
![]() 1 분. 읽다
1 분. 읽다
![]() 에 게시됨
에 게시됨
이 기사 공유

이 가이드를 개선하세요
독자들은 MSpoweruser를 지원하는 데 도움을 줍니다. 당사의 링크를 통해 구매하시면 수수료를 받을 수 있습니다.

공개 페이지를 읽고 MSPoweruser가 편집팀을 유지하는 데 어떻게 도움을 줄 수 있는지 알아보세요. 자세히 보기
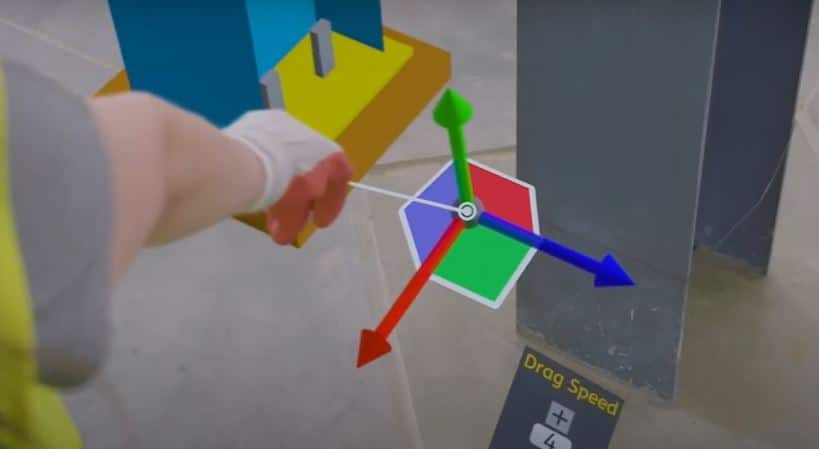
Microsoft Research는 오늘 혼합 현실을 통해 인간과 로봇 간의 보다 자연스러운 상호 작용을 가능하게 하는 새로운 프로젝트를 공개했습니다. Azure 공간 앵커 이미 공유 좌표계를 사용하여 동일한 공간에서 여러 HoloLens 및 스마트폰 장치를 공동 지역화하는 것을 지원합니다. 이 프로젝트를 통해 Microsoft Research는 카메라가 장착된 로봇을 지원하도록 Azure Spatial Anchors를 확장했습니다.
이를 통해 같은 공간을 공유하는 인간과 로봇이 자연스럽게 상호 작용할 수 있습니다. 인간은 로봇의 계획과 의도를 볼 수 있고 로봇은 사람의 관점에서 주어진 명령을 해석할 수 있습니다.
Microsoft는 Azure Spatial Anchors Linux SDK용 ROS 래퍼를 생성하여 로봇(및 비전 기반 센서 및 자세 추정 시스템이 장착된 기타 장치)이 Azure Spatial Anchors를 생성 및 쿼리할 수 있도록 하여 로봇이 AR과 공동으로 지역화할 수 있도록 합니다. -사용 가능한 전화 및 Hololens 장치. 프로젝트를 확인할 수 있습니다 여기 GitHub에서.
출처: Microsoft